Gait Transition via a Velocity-Conditioned Policy
Similar Energy Consumption Trend
between Our Robot and Horses
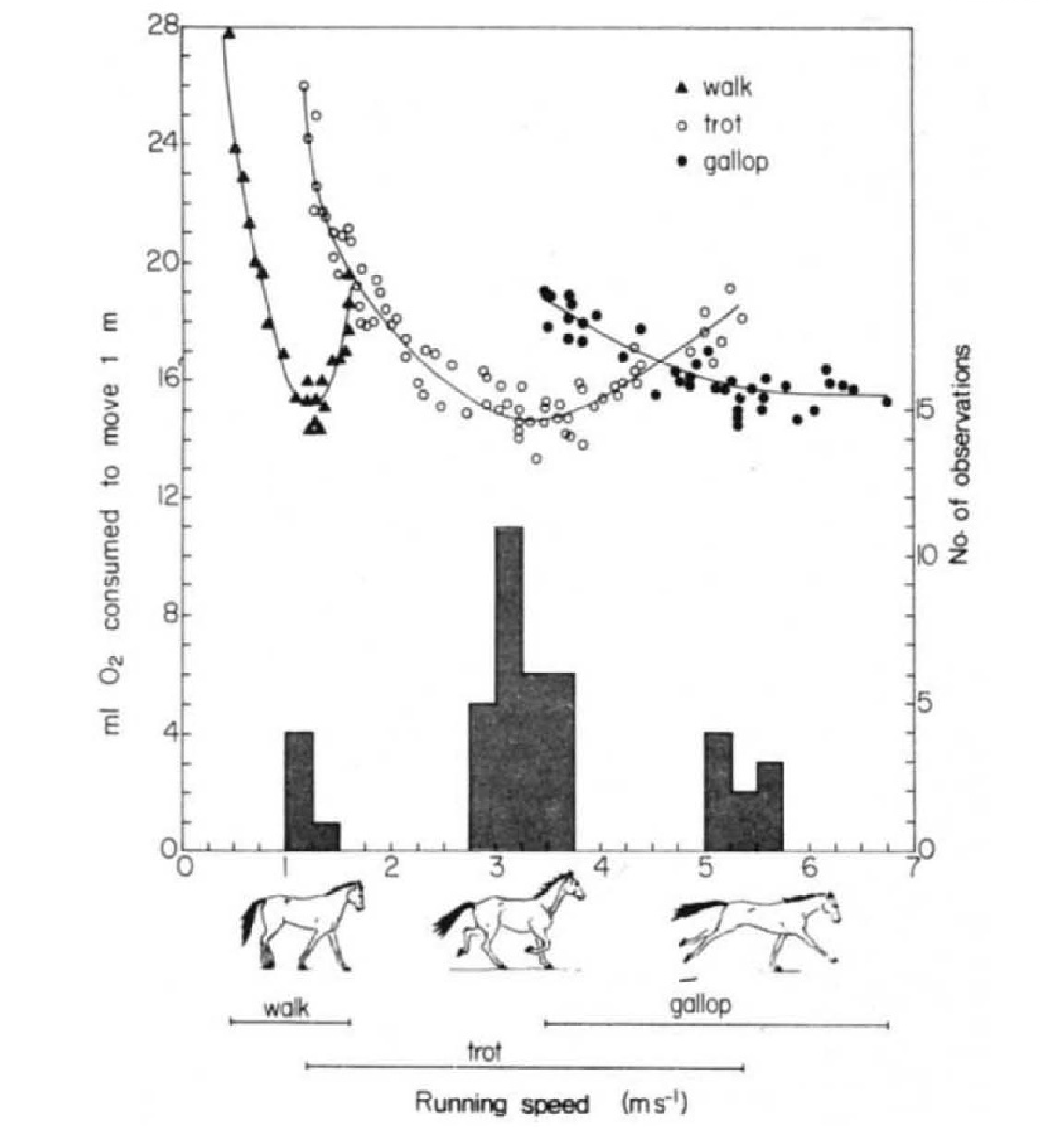
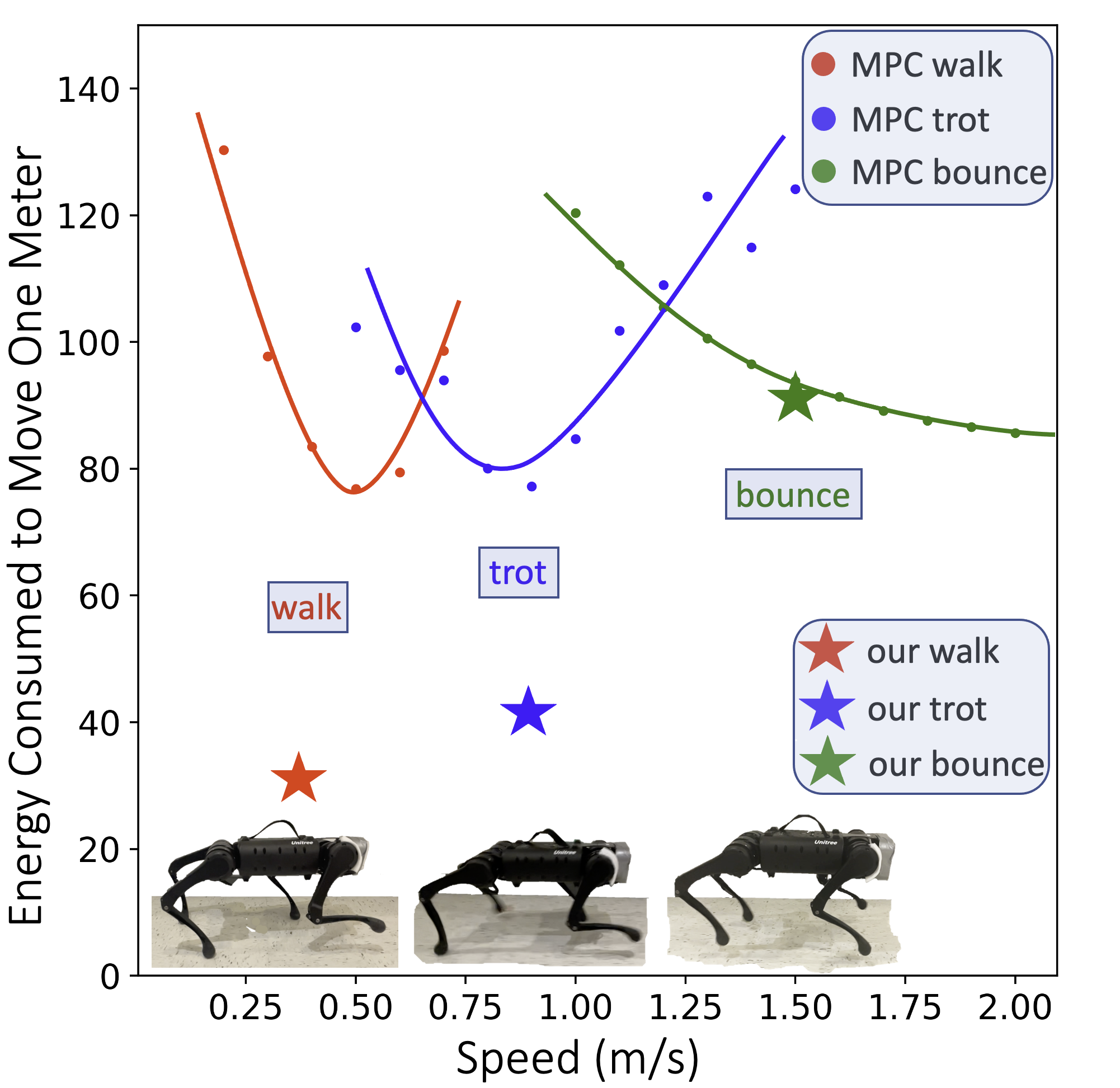
In Biomechanics, Froude number is a metric characterizing gaits of quadrupeds and bipeds. Animals with a similar morphology but with different sizes tend to use the same gait when moving with equal Froude numbers. Our robot has similar Froude numbers as horses and sheep. The plot on the left (Hoyt et al. 1981) analyzes the energy consumption of different horse gaits across different speeds. Shown on the right, the energy consumption plot of our robot has a similar trend, which also validates certain gaits will emerge at certain speeds if we minimize the energy consumption.
Foot Contact Plots of Walking, Trotting, Bouncing (Galloping)